模拟战场驾驶,铸就实战精兵
开启现代化军事训练新时代
多维度技能训练,锻造战场驾驭能力


多场景驾驶模拟
驾驶训练全覆盖,全方位训练提升



科技驱动驾驶训练,创新铸就强军之路
前沿科技应用,革新传统训练模式,实现强军目标
驾驶模拟训练系统产品形态

无自由度模拟/远程驾驶台
高度还原真实驾驶操作模拟驾驶台主要用于模拟驾驶操作,适用驾驶教学;远程驾驶台通过网络实现对远端车辆的实时操控。
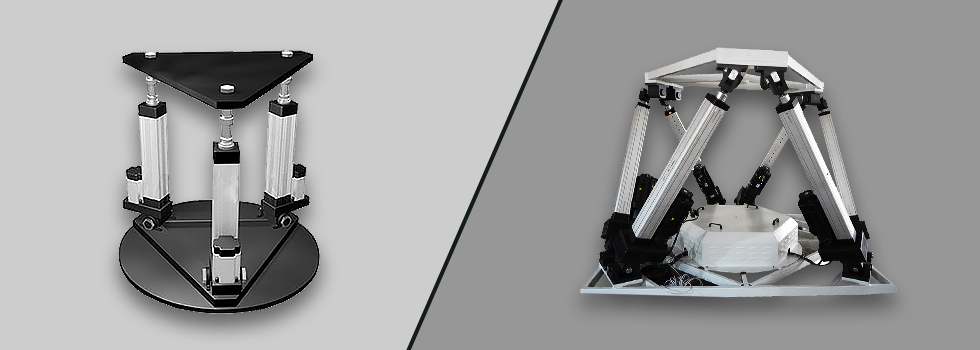
三自由度/六自由度模拟驾驶台
全面运动模拟 真实动态变化全方位运动模拟,显著提升驾驶训练的沉浸感。适合高级驾驶训练,如特种车辆驾驶、复杂地形驾驶和应急处置训练。

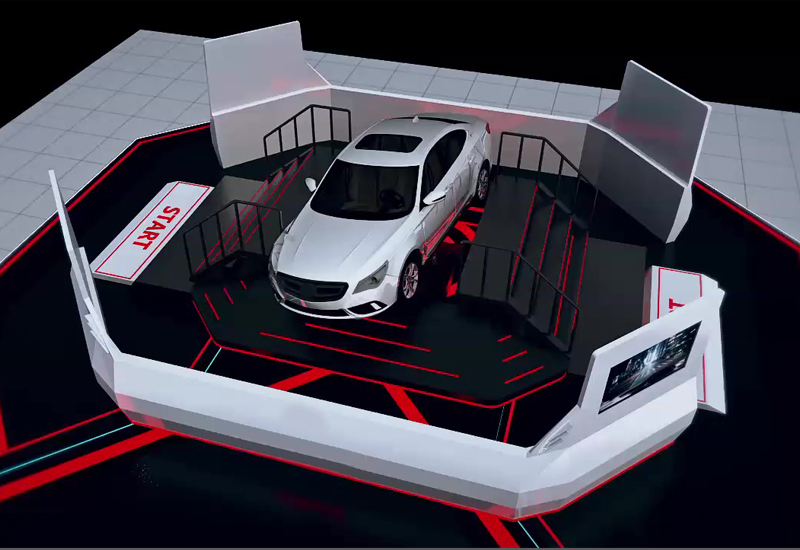
三自由度+滑轨驾驶台
多种大型车辆1:1还原该系统支持多种复杂特种车辆驾驶场景,包括重型运输车、装甲车和工程车辆等。系统涵盖丰富车型、完整训练课目、多样地形,训练地形高度仿真,高度还原特种车辆在复杂路况和战场环境中的动态表现。
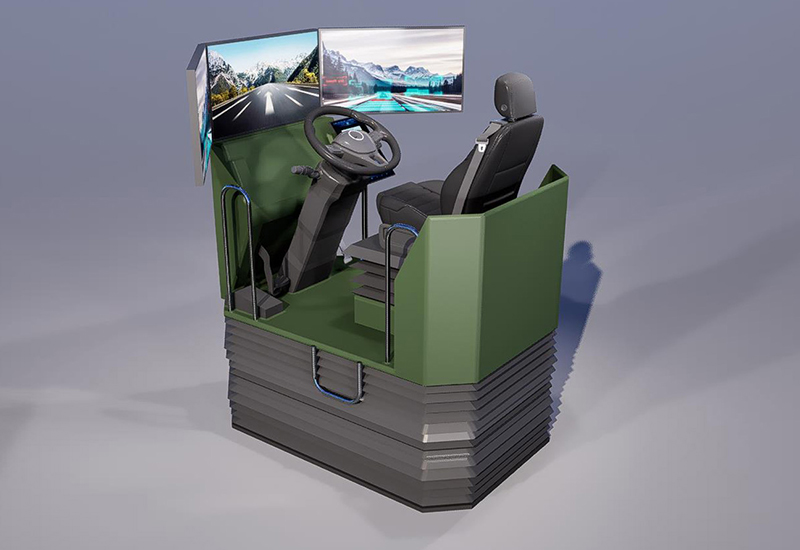
六自由度+真车座舱驾驶台
基础驾驶,被动引导专为初学者和基础驾驶训练设计的设备,采用被动式汽车驾驶模拟座舱,提供安全、高效的驾驶训练体验。该系统通过语音提示和操作引导,帮助训练者学习正确的驾驶操作顺序,掌握基本驾驶技能。
系统概述
三自由度/六自由度功能对比
| 功能/特点 | 三自由度模拟驾驶台 | 六自由度模拟驾驶台 |
|---|---|---|
| 运动自由度 | 俯仰、侧倾、升降 | 滚动、俯仰、偏航、纵向位移、横向位移、垂向位移 |
| 运动范围 | 有限的垂直和水平运动 | 全方位运动,模拟复杂动态变化 |
| 成本 | 较低,适合预算有限的场景 | 较高,适合对模拟效果要求高的场景 |
| 空间需求 | 空间占用小 | 空间占用较大 |
| 沉浸感 | 提供基础的动态反馈 | 高度沉浸,模拟真实驾驶体验 |
| 适用场景 | 基础驾驶训练、理论学习 | 高级驾驶训练、复杂地形驾驶、应急避险训练 |
| 维护难度 | 维护简单 | 维护复杂,专业性更强 |
驾驶模拟训练系统
 部队驾驶模拟训练系统是一种高度集成化的现代化军事训练设备,旨在通过虚拟仿真技术为部队驾驶员提供一个高度逼真、安全且高效的驾驶训练环境,以提升其驾驶技能和应对复杂战场环境的能力。
系统能够模拟各种地形、天气和战场条件,如山地、沙漠、城市等,以及不同天气和光照情况,帮助驾驶员适应复杂环境;支持坦克、装甲车、卡车等多种军用车辆的模拟训练,满足不同兵种需求;配备与真实车辆一致的操作装置,如方向盘、踏板、仪表盘等,提供真实的操作体验。系统能够实时监控驾驶员操作,提供反馈和评估,帮助改进驾驶技能和战术应用。系统能够记录训练数据,便于后期分析,优化训练方案。能够支持多台模拟器联网,进行车队协同、战术配合等训练,提升团队协作能力。
部队驾驶模拟训练系统是一种高度集成化的现代化军事训练设备,旨在通过虚拟仿真技术为部队驾驶员提供一个高度逼真、安全且高效的驾驶训练环境,以提升其驾驶技能和应对复杂战场环境的能力。
系统能够模拟各种地形、天气和战场条件,如山地、沙漠、城市等,以及不同天气和光照情况,帮助驾驶员适应复杂环境;支持坦克、装甲车、卡车等多种军用车辆的模拟训练,满足不同兵种需求;配备与真实车辆一致的操作装置,如方向盘、踏板、仪表盘等,提供真实的操作体验。系统能够实时监控驾驶员操作,提供反馈和评估,帮助改进驾驶技能和战术应用。系统能够记录训练数据,便于后期分析,优化训练方案。能够支持多台模拟器联网,进行车队协同、战术配合等训练,提升团队协作能力。
驾驶模拟训练器技术参数
| 一、软件系统 | ||
|---|---|---|
| 1. 驾驶软件功能(支持VR/平面切换) | ||
| (1)理论知识 | 科目一、科目四题库管理,支持题目添加 | |
| (2)场地驾驶 | 直角转弯|S形路|侧方停车(左/右)|倒车入库|坡道起步|上坡转弯换挡 单凸路|横断路|单边桥|双边桥|高架桥|圆形错位障碍|错位小巷 限制门|综合技能驾驶|组合限制路段 |
|
| (3)道路驾驶 | 一般道路|城市道路|高速道路|山区道路|乡村道路|戈壁沙漠 草原荒漠|高原道路|达坂路 |
|
| (4)复杂路段 | 泥泞路段|涉水路段|松沙路段|乱石路段|冰雪路段 | |
| (5)战地驾驶 | 进出掩体|山丘|侧坡|蛇形障碍|燃烧路段|反坦克壕|堑壕 弹坑|浮桥|战地组合障碍 |
|
| (6)特殊天候 | 夜间|雨天|雾天|雪天|风沙天候 | |
| (7)运输工具 | 铁路平车|舰船|运输机 | |
| (8)应急避险 | 保胎|转向失灵|制动失灵|熄火|车辆失火|突遇飞石 | |
| (9)车辆防护 | 隐蔽伪装|核沾染区|生化袭击地段 | |
| (10)车型/天气 |
支持车型: 皮卡/北汽勇士/解放系列/东风系列/陕汽/豪沃/长城/江铃等38种军用车型 天气系统: 晴/阴/雨/雪/雾/夜/风沙/雷暴/霜冻/霾/冰雹/热浪/寒潮等16种天候 |
|
| 2. 联网考核功能 | ||
| (1)用户管理 |
• 用户类型:管理员/教员/学员 • 操作功能:查看/删除/编辑/注册 • 数据交互:Excel导入导出 • 查询功能:支持多条件检索 |
|
| (2)设备管理 |
• 状态管理:停用/脱机/联机 • 设备编号:顺序注册/指定编号 • 可视化布局:可拖拽图标定位 • 注册机制:客户端小程序双向通信 |
|
| (3)模板系统 |
• 训练模式:单车考核/分队编组 • 科目配置:XML结构化数据表 • 环境组合:天气/时间/战场/交通 • 约束规则:天候与地形匹配机制 |
|
| (4)模拟考试 |
• 状态控制:准备/开始/完成三态 • 时间管理:自动计时/强制提交 • 监控系统:双视角/地图轨迹 • 干预功能:动态加载/实时纠错 |
|
| (5)编队训练 |
• 房间机制:导控台主动分配 • 实时显示:状态/地图/监控 • 动态调整:驾驶参数即时修改 |
|
| (6)数据管理 |
• 存储方式:数据库+视频存档 • 分析功能:60分钟/100条记录 • 回放系统:多视角/进度控制 • 导出格式:Excel/PDF/文本 |
|
| (7)成绩系统 |
• 多维查询:时间/科目/班级 • 详情报告:车型/天候/战场环境 • 批量操作:删除/导出/打印 |
|
硬件设备规格表
| 类别 | 项目 | 规格 |
|---|---|---|
| 模拟驾驶舱 | 座舱尺寸 | 长×宽×高:≤2300×1200×1900(mm),重量:≤500kg |
| 材质 | 整体框架采用高强度钣金组装,外壳使用优质玻璃钢材质 | |
| 座椅 | 真车座椅,可调节座椅前后及靠背斜度。座椅安全带配置开关感应装置,自动提醒安全带佩戴状态 | |
| 转向系统 | 方向盘采用实车配件,内部转向机构高强度抗疲劳扭簧、齿轮、同步轮,力反馈效果,力感同实车,可自动回位 | |
| 离合器踏板 | 离合器踏板总行程应在50mm~120mm范围内,踏板力应在20N~150N范围内 | |
| 制动踏板 | 制动踏板最大行程在50mm~135mm范围内,制动踏板力应小于等于100~500N | |
| 驻车制动器操纵杆 | 驻车制动杆拉力应在 20N~100N范围内 | |
| 加速踏板 | 加速踏板总行程在50mm~l00mm范围内,踏板力应在20N~100N范围内 | |
| 变速器操纵杆 | 变速器操纵杆根据档位类别标示档位,变速器操纵杆操纵力应在 10N~50N范围内 | |
| 仪表 | 采用实车仪表,模拟训练时仪表能真实显示实时驾驶时速 | |
| 组合开关 | 主要功能:左转向灯、右转向灯、远光灯、近光灯、快慢雨刷、应急灯、喇叭、点火开关、雾灯等 | |
| 操控台 | 具有应急开关、喇叭按钮、灯光开关等,内含小键盘等功能按键 | |
| 计算机 | 内存:≥16G 处理器:四核八线程以上,主频≥2.0GHZ 硬盘:≥2T 显卡:独立显卡≥2G 转速≥7200 | |
| 动感平台 | 组成 | 有效载荷重量≥600kg;总载荷:≥800kg(含上平台及铰链) |
| 运动能力指标 |
自由度 位移或角度 速度 加速度 重复精度 定位精度 俯仰 ±12° 50°/s ±100°/s2 0.05° 0.01° 侧倾 ±11° 50°/s ±100°/s2 0.1mm 0.05mm 升幅 0-130mm 166mm/s 0.3g 0.1mm 0.05mm |
|
| 功能要求 | 模拟汽车在驾驶过程中的姿态变化,能够模拟上下、侧倾、俯仰等姿态 | |
| 综合控制监测系统 | 硬件为用户计算机,软件为研制方配合开发;平台启动时自动对主要部件进行检测,发现故障时通过屏幕或者声音报警,经处置后方可运行。在系统运行时实时检测,当检测到故障时自动切入安全保护模式。系统具有过载保护、过流保护、过压保护和短路保护 | |
| 产品标准 | 严格按照JT/T-378-2014行业标准研发生产,符合驾校配置机动车驾驶模拟器设备标准 | |
| 环境条件 |
1)运行环境温度:0-+40°C 环境下安全运行; 2)储存温度:-10°C~+50°C; 3)湿度:≤90%RH(不结露) |
|
| 可靠性和可维修性 | 模拟器一次连续工作时间不低于24小时 | |
| 视景仿真平台 | 显示屏 | 液晶显示器:≥49寸,超宽带鱼全面屏32:9,分辨率3840*1080 |
| VR沉浸式体验装置 | 高清VR头盔,沉浸式VR驾驶软件系统 | |
| 联网考核控制台 | 控制台台体 |
1)台面:钣金+防静电喷塑,具有耐磨、耐高温、耐刮、抗渗透、容易清洁、防潮、不褪色、触感细腻等特点,可选颜色种类多。 2)主体框架、前后门:优质冷轧钢板1.5-3.0mm厚材料制作,表面静电喷涂,零甲醛,零气味。 3)综合布线:矩形框架,坚固耐用,强电弱电分离线槽,内部横纵向强电弱电分开便于走线,方便捆扎, 科学安全管理。 4)侧板和台面板材、颜色匹配。配件采用活动托盘、活动键盘托。 5)屏风背板墙精选优质冷轧板制作,可挂单屏、双屏、多屏液晶支架,尺寸长约1500mm,宽约900mm,高约1100mm。用于存放教员用计算机、服务器、音响等。 |
| 显示器 | 高清液晶显示器尺寸≥27寸,分辨率2560*1440 | |
| 主控机 | 计算机,内存:≥16G 处理器:四核八线程以上,主频≥2.0GHZ 硬盘:≥2T 显卡:独立显卡≥2G 转速≥7200 | |
| 打印机 | A4激光打印机,国产品牌,打印速度≥28页/分钟,有线连线;打印分辨率≥600*600dpi | |
| 交换机 | 不低于16个 10/100/1000Base-T;不少于4个1000Base-XSFP。支持RPS冗余电源。包转发率:不低于78Mpps;交换容量:不低于256Gbps | |
| 配套设施 | 主要包括电源线布设、信号传输线材(网线、光纤等)布设等相关配套设施 |
北京某部驾驶模拟器技术参数
硬件组成
| 硬件设备 | 功能描述 |
|---|---|
| VR头显设备 |
|
| 三自由度驾驶训练模拟器 |
|
| 六自由度驾驶训练模拟器 |
|
软件组成
| 模块 | 功能 | 详细描述 |
|---|---|---|
| 导调及综合管理 | 任务下发 | 组训人员能够根据需要对学兵下发不同的训练指令,如“张三作为班组组长开始进行班组行车训练任务”等。 |
| 任务管理 | 组训人员能够对学兵的训练考核课目进行增加、删减和修改等操作,并实时控制训练过程。 | |
| 系统加载 | 根据设置的任务,配置初始化参数并发送给各学兵,初始化数据包括训练战地的自然环境、作战单元的地理位置等。 | |
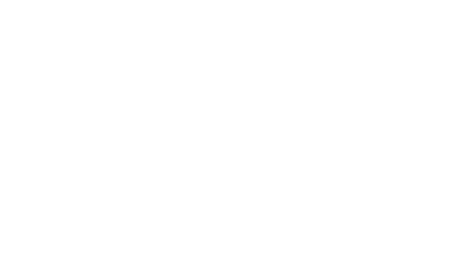
| 环境设置 | 组训人员能够对训练场景和内容进行个性化定制,修改训练场景、天气、路径、时间和计划等。 | |
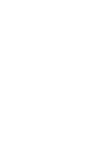
| 教员训练进程控制 | 实时监控学兵训练过程,具备录制、成绩评定、投屏展示、二三维呈现、排名展示等功能。 | |
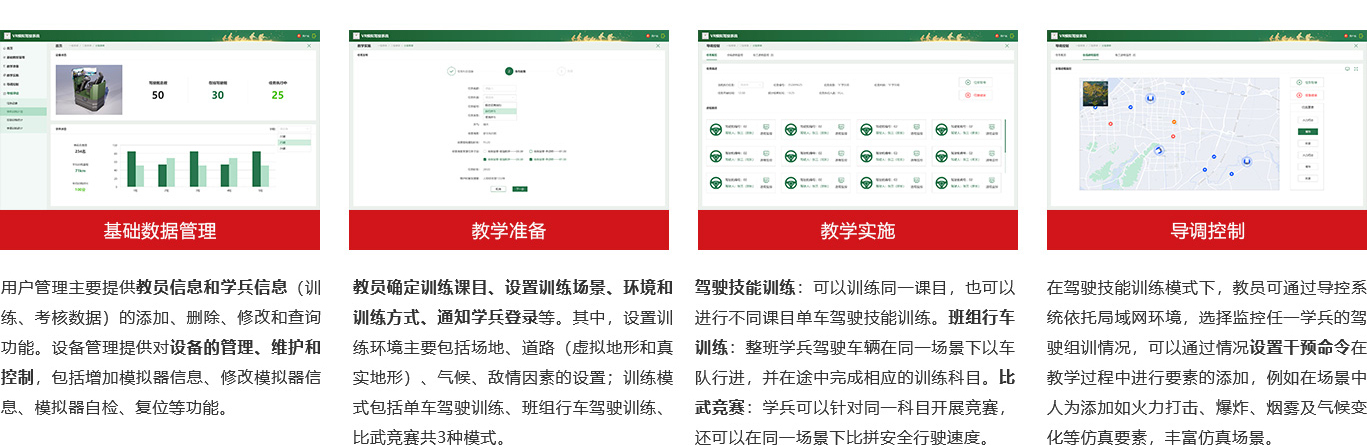
| 平台框架建设 | 教员应用功能 | 包括基础数据管理、教学准备、教学实施、导调控制、考核评估、复盘回放六部分功能。 |
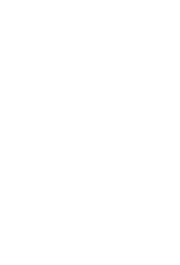
| 学兵应用功能 | 学兵在教员完成教学准备后开展训练,分为驾驶技能训练、班组行车训练、比武竞赛。 | |
| 训练考核评估功能 | 依据训练大纲确定考核标准,具备成绩存储、查询、分析等功能。 | |
| 自检功能 | 各传感器、机件具备自检功能,形成常见故障现象、代码及解决表。 | |
| 模拟驾驶训练功能 | 模拟器基本要求 | 驾驶操作部件与实装功能一致,具备三(六)自由度平台、仪表模拟、汽车动力学模型等。 |
| 训练课目库 | 包括解放CA1125J、泰安TA4360带半挂、BJ80指挥车、安凯大客车等车型的训练课目。 | |
| 考核评估功能 | 主体模块 | 学兵应用主要分为驾驶技能训练、班组行车训练、比武竞赛。 |
| 数据采集及传输 | 数据采集 | 实时检测转向机构、变速器、踏板、各种开关操作变化,并通过USB/RS232传输给控制计算机。 |
| 数据传输 | 实现VR设备、驾驶模拟器和软件系统之间的数据采集和传输。 | |
| 辅助软件 | VR交互应用,实现三维数据、虚拟仪表开关由头盔显示。 | |
| 软件检测 | 第三方软件测评机构进行软件功能测试 | |
| 软件系统集成 | 构建数据库 | 用于存储学兵的姓名、人脸等相关信息,并通过主控电脑组织模拟训练。 |
训练建模资源
| 模块 | 子模块 | 详细描述 |
|---|---|---|
| 整体地形场景 | 设置原则 | 数字地图生成与动态资源加载相结合。 |
| 地幅 | 220平方公里。 | |
| 地形 | 包括山地、丘陵、平原、沙漠、岸滩、湖泊、河流,各类地形呈区域分布。 | |
| 地貌 | 除特定地貌特征(沙漠、湖泊等),其他均有植被覆盖。 | |
| 地物 | 自然形成、人工构筑(平时、战时)。 | |
| 其他要求 | 数字地图比例尺≥1:1000,支持网格数不小于4096×4096,支持卫星图最高像素25000×25000,地表材质细节纹理最大分辨率为4096×4096像素。 | |
| 仿照现有场地课目建模63类 | 基础驾驶14类 | 起步;直线行驶;停车;限定距离换挡;直角转弯;"8"字形路;"S"形路;定位停车;垂直停车;斜位停车;侧方停车;乘坐车坡道定点停车与坡道起步;乘坐车曲线行驶;乘坐车倒车入库。 |
| 场地驾驶10类 | 坡道起步;上坡转弯换挡;单凸路;横断路;单边桥;双边桥;高架桥;圆形错位障碍;错位小巷;限制门。 | |
| 式样驾驶3类 | 公路掉头;倒车移位;综合技能驾驶。 | |
| 比武驾驶13类 | 通过限制路段、通过障碍路段等。 | |
| 战地驾驶15类 | 车辆掩体;山丘;侧坡;蛇形障碍;燃烧路段;反坦克壕;堑壕;弹坑路;战地组合障碍;通过沾染路段;通过伏击路段;通过空袭路段;无照明条件下夜间驾驶;人员紧急救护;模拟上下运输机。 | |
| 复杂路段驾驶8类 | 泥泞路段;涉水路段;松沙路段;卵石路段;震毁路;模拟冰雪路;模拟雨、雾天驾驶;车辆自救与互救。 | |
| 相关要求 | 所有课目按照营区场地1:1进行设计建模,符合《新训汽车驾驶员训练教材》《后勤单个人员训练纲目》对场地设置和训练考核标准。 | |
| 场地以外课目建模63类 | 比武驾驶17项 | 通过特殊地段、通过水障碍、重装备运输车通过限制路段、接力赛路段、射击区、快速移位长距离倒车等。 |
| 战地驾驶7项 | 模拟通过浮桥;摘装、挂装;牵引武器装备驾驶;牵引武器装备进出阵地;牵引武器装备通过复杂路段;牵引武器装备倒库;牵引武器装备上下铁路平车、舰(船)。 | |
| 复杂路段驾驶4项 | 模拟高速公路;炎热条件下驾驶;严寒条件下驾驶;风沙天驾驶。 | |
| 道路驾驶6类 | 山区道路驾驶;一般道路驾驶;沙漠戈壁地区驾驶;草原荒漠地区驾驶;高原道路驾驶;夜间驾驶。 | |
| 应急避险驾驶7类 | 车辆爆胎处置;刹车失灵处置;车辆失火处置;紧急规避障碍;车辆侧滑处置;风窗玻璃碎裂处置;发动机突然熄火处置。 | |
| 大型特种车驾驶22类 | 起步、停车、直线行驶;转向、换挡、制动;倒车(沿线倒车、窄路倒车、过障倒车定位、快速移位长距离倒车);倒库(库前倒库、"T"形倒库);转向(直角转弯、"S"形路、错位小巷);定位停车(车前定位、车中定位、车后定位、斜位停车);通过桥涵(单、双边桥、限制门);连续障碍路;直线限制路;平稳驾驶;停靠货台;倒车挂装与牵装倒库。 | |
| 实景道路建模 | 开发北京市特定路段场景(不少于15公里),体现潮汐车道、堵车高峰路段、复杂立交桥、高架桥、辅路驾驶等场景。 | |
| 相关要求 | 所有课目均符合《新训汽车驾驶员训练教材》《后勤单个人员训练纲目》对场地设置和训练考核标准。 | |
| 训练车型 | 三维模型 | 解放CA1125J、安凯大客车、BJ80指挥车和泰安TA4360(带半挂),包括车身、驾驶室等进行高精细建模。 |
| 毁伤模型 | 包括轻、中、重三种遭毁伤后的三维模型,如车辆车体的形变、车辆爆炸碎片、轮胎爆炸碎片、玻璃碎片。 | |
| LOD优化 | 模型分为两级LOD优化,分别为原模型面数50%和10%两个阶段LOD。 | |
| 动力系统 | 解放CA1125J、安凯大客车、BJ80指挥车和泰安TA4360(带半挂)动力系统,满足驾驶模拟交互操作。 | 可与泥泞路段、涉水路段、松沙路段、卵石路段、冰雪路段、高速公路六种地面依据路面工况标准进行交互。 |
| 虚拟仪表开关 | 解放CA1125J、安凯大客车、BJ80指挥车和泰安TA4360(带半挂),按实装仪表形状、参数输出方式、位置关系、大小进行设计。 | 通过触摸屏点击、选择、位置转换完成操作。 |
| 其他三维模型素材 | 相关车辆 | 包括装甲车、战场救护车、指挥车等;民用车辆有皮卡车,SUV,乘坐车(小型、中型、大型),货车(轻型、重型)等。 |
| 地物 | 高速收费站,加油站,桥涵,村庄等地物不少于4种模型;辅助设施包含交通信号、道路栏杆等不少于6种模型。 | |
| 植被模型技术指标 | 植被支持alpha镂空贴图,基础模型制作(树木约为20000个三角面,灌木约为10000个三角面、草约为1000个三角面)。 | |
| 火力打击素材 | 直升机、火炮、强击机模型 | 支持贴图分辨率不少于1024×1024,不少于20000个三角面,有直升机、火炮、强击机打击动画。 |
| 烟雾、火花、碎片效果 | 有烟雾、火花、碎片效果,不能造成系统卡顿。 | |
| 毁伤动画效果 | 火力打击需在地面或者房屋等模型上形成简单的毁伤动画效果,如弹坑、碎片等。 | |
| 音响效果 | 包括爆炸声,车辆启动刹车声,飞机轰炸声,炮弹爆炸声,炮弹射击声音,子弹击中车辆声,人员哀嚎声,风声,雨声,撞击声等11种。 | |
| 时间素材 | 昼夜变化 | 包括昼夜两种时段,随着时间推移发生变化,模拟24小时昼夜光照变化。 |
| 天气素材 | 天候气象 | 包括晴天、雨天、雾天、雪天、风沙天等五种天候,雨天、雾天、雪天、风沙天分为三个级别。 |
| 人物模型 | 我军士兵、军官、敌军、平民 | 包括我军士兵、军官、敌军、平民(男女老幼)等共4类,模型要求包含骨骼动画,如行走、跑步、跳跃、射击、卧倒等共8类。 |
通用运输车驾驶模拟器(双座六自由度)
一.学员训练分系统
| 模块 | 子模块 | 详细描述 |
|---|---|---|
| 软件部分 | 训练功能 | 具备符合大纲规定课目的驾驶模拟训练功能。 |
| 自检功能 | 具备系统自检功能。 | |
| 引导提示功能 | 在训练模式下可开启和关闭该功能,开启状态下对错误操作可进行文字和语言提示。 | |
| 考核功能 | 能够实现考核功能。 | |
| 性能要求 |
|
|
| 硬件部分 | 六自由度平台 |
|
| 驾驶舱体 |
|
|
| 转向机构 |
|
|
| 油门踏板 | 根据单位编配车辆情况,任选一种实装件改装或自研(金属材质),尺寸、位置、力感、行程、颜色等与实装一致。 | |
| 离合器踏板 | 根据单位编配车辆情况,任选一种实装件改装或自研(金属材质),位置、力感、行程、颜色等与实装一致。 | |
| 制动踏板 | 根据单位编配车辆情况,任选一种实装件改装或自研(金属材质),尺寸、位置、力感、行程、颜色等与实装一致。 | |
| 驻车制动 | 根据单位编配车辆情况,任选一种实装件改装或自研(金属材质),尺寸、位置、力感、行程、颜色等与实装一致。 | |
| 变速机构 |
|
|
| 仪表盘显示屏(横屏) |
|
|
| 前方视景显示屏 |
|
|
| 左右后视镜显示屏 |
|
|
| 耳麦 |
|
|
| 音箱 | 满足声音外放需求。 | |
| 计算机 |
|
|
| 主控台 | 计算机、显示器、控制台主体。 |
二、资源库
| 类别 | 内容 |
|---|---|
| 驾驶车型库 |
|
| 驾驶课目库 |
|
| 驾驶条件库(其他三维模型素材) |
|
| 地形道路库 |
|
重装备运输车驾驶模拟器(双座六自由度)
一、学员训练分系统
| 学员训练分系统 - 软件部分 | |
|---|---|
| 核心功能模块 |
• 驾驶操作响应(启动/熄火/转向/离合/制动/加速) • 高仿真环境模拟训练 • 系统自检功能 • 错误操作语音+文字提示(可开关) • 考核评分系统 |
| 性能要求 |
视景系统:
• 前方/后视镜视角与实车一致 • 后视镜视景可调 操作部件: • 力感/行程/颜色与实装一致 • 仪表触摸屏按实车布局设计 动力学模型: • 车型专用运动学仿真 • 支持雨雪风雾/昼夜场景生成 数据采集: • 帧率≤20ms • 信号采集频率≥50Hz |
| 学员训练分系统 - 硬件部分 | |
| (1) 六自由度平台 | |
| 运动参数 |
自由度动作:
• 滚动:±10°@±60°/s²
关键指标:
• 承载质量≥500kg• 俯仰:±10°@±60°/s² • 偏航:±10°@±60°/s² • 纵荡:±100mm@0.3g • 横荡:±100mm@0.3g • 垂荡:±100mm@0.3g • 连续工作≥24h • 电压容差±10% • 紧急断电安全恢复 |
| (2) 驾驶舱体 | |
| 规格 |
• 双座半封闭式(玻璃钢/金属材质) • 尺寸≥1800×1500×1200mm • 连接后总高≤2800mm |
| (3)-(8) 操作部件 | |
| 通用要求 |
• 金属材质实装级改装
• 力感/行程/颜色与实车一致 • 变速机构互锁功能 • 驻车制动仿真 • 离合器联动换挡 |
| (9)-(11) 显示系统 | |
| 配置要求 |
仪表盘:1920×1080@FHD 前方视景:多屏拼接≥3800×1080 后视镜:双屏1920×1080@FHD |
| (12)-(13) 音频设备 | |
| 技术参数 |
耳麦: • 40mm单元/103dB灵敏度 • 全指向麦克风 音箱:支持环境声效外放 |
| (14) 计算机配置 | |
| 硬件规格 |
CPU:6核12线程@4.6GHz
内存:16GB DDR4 存储:1TB HDD + 256GB SSD 显卡:8GB GDDR6@PCIe4.0 显示输出:4屏7680×4320 集成:内嵌式安装 |
| (15) 主控台 | |
| 集成计算机+显示器+控制台主体 | |
二.资源库
| 类别 | 内容 |
|---|---|
| 驾驶车型库 |
|
| 驾驶课目库 |
|
| 训练条件库(其他三维模型素材) |
|
| 地形道路库 |
|
被动式汽车驾驶模拟训练系统
一.学员训练分系统
| 1. 软件部分 | |
|---|---|
| 核心功能模块 |
• 驾驶操作响应(启动/熄火/转向/离合/制动) • 高仿真训练环境构建 |
| (1)-(5) 功能要求 |
• 大纲规定课目训练
• 系统自检功能 • 语音引导+错误扣分机制 • 考核评分系统 • 训练场景动态下发 |
| (6) 性能要求 |
视景系统:
• 多视角同步/后视镜可调 操作部件: • 力感/行程1:1仿真 动力学模型: • 车型专用运动学仿真 环境模拟: • 雨雪风雾/昼夜场景生成 数据采集: • 帧率≤20ms/采集频率≥50Hz |
| 2. 硬件部分 | |
| (1) 驾驶舱体 | |
| 规格参数 |
• 单座半封闭式(玻璃钢/金属) • 尺寸≥1800×1500×1200mm • 钢结构承载骨架 |
| (2)-(6) 操作部件 | |
| 通用要求 |
• 金属材质实装级改装
• 转向锁止功能 • 组合开关集成(灯光/雨刮/喇叭) • 三踏板力感仿真 • 驻车制动联动 |
| (7)-(10) 显示系统 | |
| 配置参数 |
仪表盘:1920×1080@FHD 1:1显示 前方视景:多屏拼接≥3800×1080 后视镜:双屏1920×1080@FHD |
| (11)-(12) 音频设备 | |
| 技术参数 |
• 耳麦:40mm单元/103dB灵敏度 • 音箱:环境声效外放支持 |
| (13) 计算机配置 | |
| 硬件规格 |
CPU:6核12线程@4.6GHz
内存:16GB DDR4 存储:1TB HDD+256GB SSD 显卡:8GB GDDR6@PCIe4.0 显示输出:4屏7680×4320 集成:内嵌式安装 |
| (14) 主控台 | |
| 一体化集成:计算机+显示器+控制台 | |
二.资源库
| 1. 被动驾驶训练功能 | |
|---|---|
| (1) 基础驾驶练习 |
主动引导:
操作机件识别 被动引导: 单臂小幅修/大回转/双臂交叉转/离合三动等12项 |
| (2) 进阶驾驶练习 |
• 离油协动/油制换控
• 通过"8"字/S/N形路 • 定位停车/倒车移位 • 14项综合基础驾驶 |
| 2. 驾驶车型库 | |
| 支持车型 | 解放CA1125J/豪泺1167/豪泺2197/陕汽2190N等 |
| (1) 三维模型 |
• 高精细建模≥20000三角面 • 毁伤模型3类(轻/中/重) • LOD优化50%+10%层级 |
| (2) 动力系统 |
• 泥泞/卵石/高速路面交互 • 海拔动力衰减模拟(1000/3000/5000米) |
| 3. 驾驶课目库 | |
| (1) 场地驾驶 | 直角转弯/侧方停车/S形路等14课目 |
| (2) 道路驾驶 | 城市/高速/山区/沙漠等15课目 |
| (3)-(10) 综合训练 |
• 组合限制路段9类
• 自然障碍7类 • 特殊天候5种 • 应急避险8场景 • 交通事故3类 |
| 4. 驾驶条件库 | |
| (1) 交通元素 |
• 民用车辆≥10种 • 行人类型≥15种 • 自主交通AI(会车/避障) |
| (3) 植被模型 |
• 树木10000面/4级LOD
• 物理碰撞属性 • 毁伤分段模型 • 1024*1024贴图 |
| (4)-(7) 环境系统 |
• 6种天候(3级细分) • 24小时动态光照 • 人物骨骼动画(8类动作) |
| 5. 地形道路库 | |
| (1) 整体地形 |
• 150平方公里建模 • 高程数据米级精度 • 动态加载延迟≤1s • 60fps渲染帧率 |
| (4)-(14) 专项地形 |
城市道路:
三车道/隔离带/信号系统 高速公路: 全封闭/120km限速 特殊路段: 1.2m涉水/冰雪/松沙 运输场景: 铁路平车/舰船/运输机 |
汽车模拟驾驶系统
| 序号 | 模块名称 | 关键参数及功能描述 |
|---|---|---|
| 1 | 汽车驾驶模拟座舱(VR) | 三自由度动态支架(尺寸1850×900×1500mm±10%),静态承重500kg;含五大真车操作件(转向器、油门等),ABS材质档位外罩,安全暂停按钮。 |
| 2 | 仪表盘显示 | 实装仪表实时通讯,支持时速表、转速表、灯光指示、报警灯等,动态与静态性能符合实车标准。 |
| 3 | 转向器 | 转向范围0-1060°,脉冲分级≥180/圈,自动回正;油门/刹车信号分级≥5级或无级输出。 |
| 4 | 变速器 | 模拟实车档位,显示屏显示档位,操纵力10N~50N。 |
| 5 | 制动踏板 | 行程50-135mm,力≤100-500N,力感/行程可调。 |
| 6 | 离合器踏板 | 行程50-120mm,力20-150N,力感/行程可调。 |
| 7 | 加速踏板 | 行程50-100mm,力20-100N,力感/行程可调。 |
| 8 | 驻车制动器操纵杆 | 拉力20-100N,力感/行程可调。 |
| 9 | 传感器 | 模拟/数字信号,声像同步(滞后<30ms),音量≥5级,力度适配成人。 |
| 10 | 制动装置 | 独立行车/驻车制动,制动有声效。 |
| 11 | 加速器 | 运动中无卡滞。 |
| 12 | 安全带 | 伸缩自如,自动回位。 |
| 13 | 汽车座椅 | 专业座椅,前后/高度可调,含三点式安全带。 |
| 14 | 操作终端 | 麒麟Linux系统,FT-D2000 CPU,8GB内存,256GB SSD+2TB HDD,Radeon 520显卡,23.8寸屏。 |
| 15 | 显示器(VR款) | 高清VR头盔,沉浸式软件系统。 |
| 16 | 模拟驾驶屏 | 49寸屏,分辨率3840×1080,刷新率144Hz,曲率1800R,接口HDMI/AUDIO。 |
| 17 | 动感平台 | 三自由度并联机构,支持位移/角度/加速度匹配,负荷≥400kg,俯仰/侧倾±7°,响应≤30ms。 |
| 18 | 互换性模块 | 电接触良好,插接点互换。 |
| 19 | 学员与考核系统信息管理模块 | 绑定学员账号,记录模拟数据,支持录屏与回放。 |
| 20 | 软件界面模块 | 主界面显示油门/刹车进度,135°广角视景,后视镜可调。 |
| 21 | 模拟仪表显示模块 | 显示时速/转速/操作进度。 |
| 22 | 画面选择模块 | 可开关后视镜、地图、错误提示等。 |
| 23 | 基础驾驶模块 | 起步、直线、换挡、转向、制动、倒车训练。 |
| 24 | 场地驾驶模块 | 坡道起步、单边桥、限制门等复杂场地训练。 |
| 25 | 复杂路段驾驶模块 | 泥泞、涉水、冰雪等特殊路段模拟。 |
| 26 | 夜间驾驶模块 | 有/无照明条件下夜间驾驶。 |
| 27 | 战地驾驶模块 | 掩体、燃烧路段、反坦克壕等战场场景。 |
| 28 | 道路场景数据库模块 | 含泥泞/石子/涉水/山区/城市/高速/危险场景等7类道路模型。 |
| 29 | 地面模型模块 | 地物模型≥4种,贴图分辨率≥1024×1024,三角面≥5000。 |
| 30 | 植被模型模块 | 支持镂空贴图,LOD分层(最高10000面,最低50面),物理碰撞属性。 |
| 31 | 效果素材模块 | 烟雾/爆炸/音响效果,支持6类环境音效。 |
| 32 | 时间素材模块 | 模拟24小时昼夜光照变化。 |
| 33 | 应急避险课目模块 | 制动失灵、爆胎、碰撞等15种紧急场景训练。 |
| 34 | 地形道路库模块 | 地形≥200km²,支持卫星贴图,道路总长≥100km,含山地/平原等。 |
| 35 | 测试调整功能模块 | 支持方向机/离合器/油门/制动器/变速器等部件测试。 |
| 36 | 虚拟车辆模型模块 | 12种车型建模(含大客/皮卡/军用等),精细驾驶室模型。 |
| 37 | 不良天气和夜间场景建模 | 雨/雾/雪/沙尘及夜间场景真实模拟。 |
| 38 | 仿真动力系统 | 车辆动力数学模型,支持驾驶交互操作。 |
部队车辆驾驶仿真模拟器

模拟驾驶导调及综合管理

训练平台应用功能