
科研驾驶仿真 / 自动驾驶产品形态

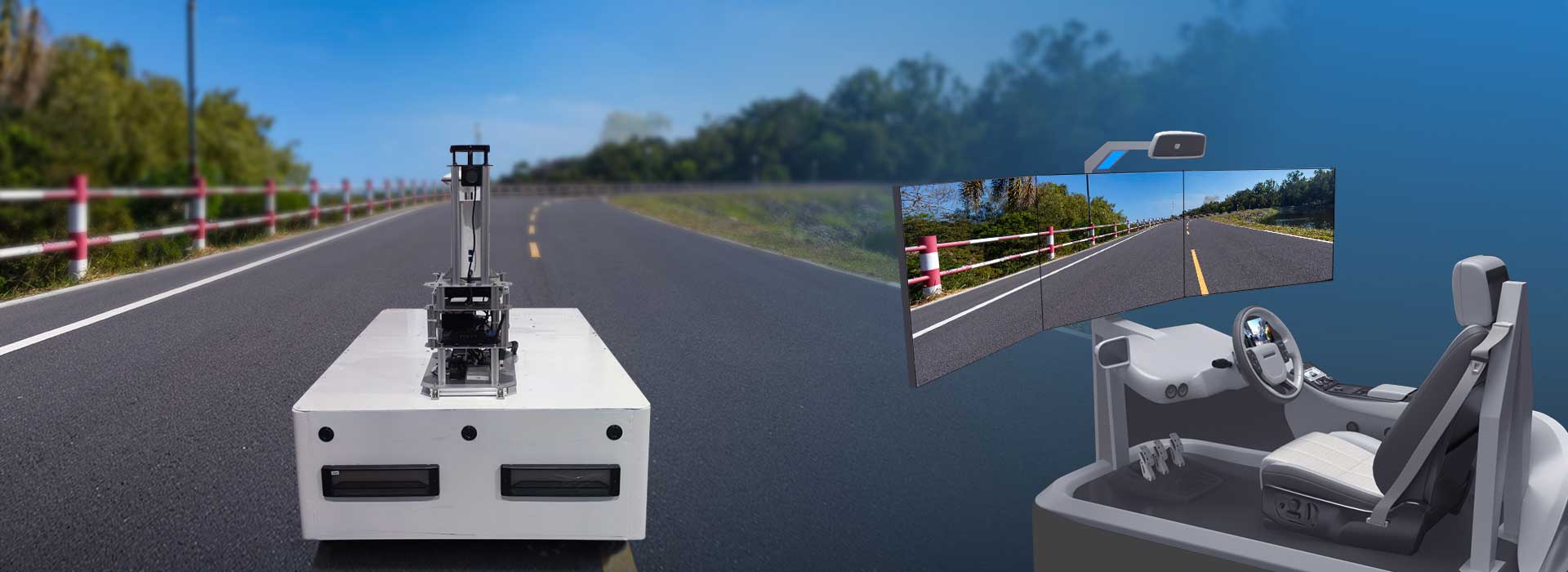
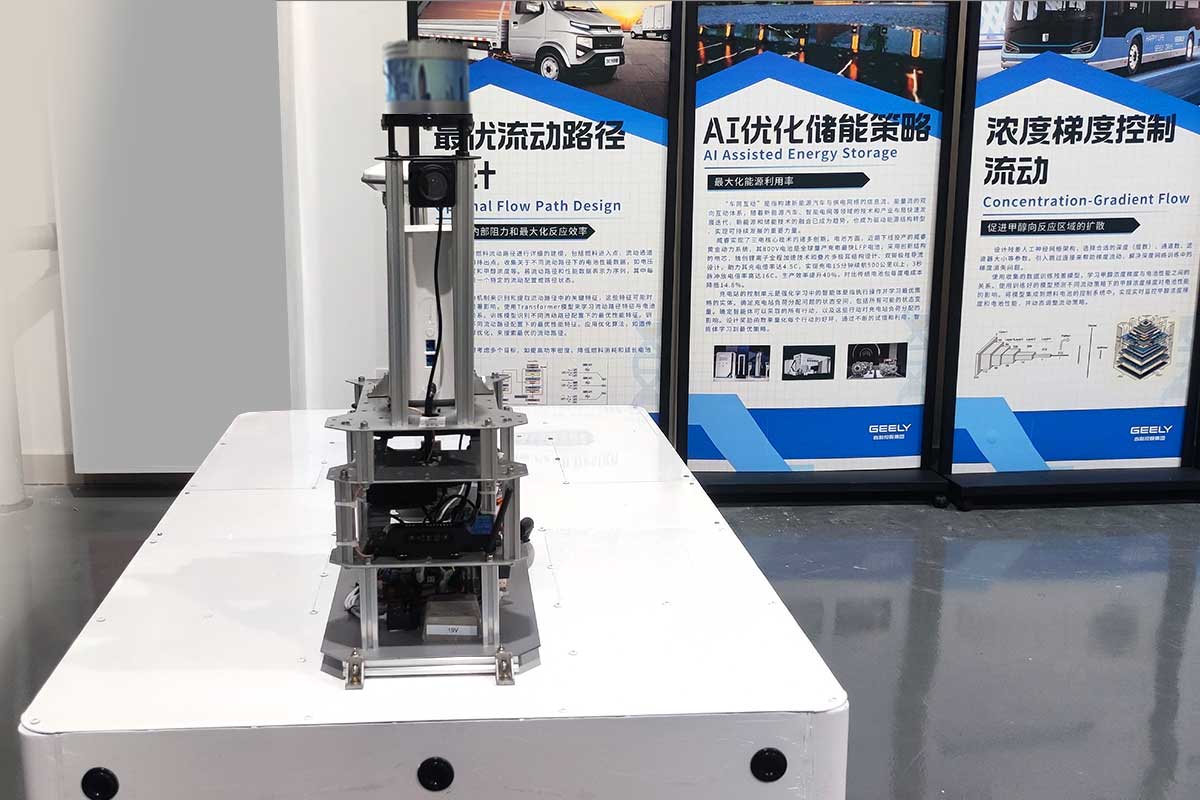
5G自动驾驶移动平台
虚实闭环验证 + 底层控制算法搭载激光雷达、传感器、车载计算单元等全套自动驾驶感知硬件,支持实车道路算法部署、传感器标定、车路协同实地测试。

5G远程驾驶智能座舱
驾驶人在环的仿真算法验证配备力反馈方向盘、竞技座舱与双屏虚拟路况场景,高精度还原车辆操控体感,用于驾驶人行为研究、ADAS 辅助驾驶训练等。

高校ADAS虚拟自动驾驶模拟舱
院校教学 + 算法科研一体化实训平台黑晶离火与中国汽车工程研究院共同研发,半实物 1:1 还原实车整车内饰座舱结构,适配域控制器 HIL 测试、智能座舱开发与全场景虚实融合科研实训。

自动驾驶仿真平台(ADAS/V2X仿真系统)
智能网联车路协同仿真验证面向 ADAS 与 V2X 场景提供高逼真仿真测试,支持功能验证、场景复现与算法迭代,完成从算法开发、硬件在环测试到系统性能评估的全流程闭环验证,加速智能网联技术落地。

高校元宇宙场景驾驶模拟器
科研与教学一体化解决方案联合中汽院共同打造的虚实融合高精度数字孪生驾仿平台,还原真车座舱结构,搭载反馈方向盘与元宇宙交通场景,支持驾驶人在环、硬件在环 HIL、多传感器仿真与 ADAS/V2X 全功能实训评测。
系统概述
本实验室面向智能网联汽车、自动驾驶算法科研、驾驶人行为学、智慧交通研究,搭建软硬一体化、虚实结合、全层级闭环自动驾驶高精度数字孪生仿真试验平台。平台可全域模拟城市道路、高速环路、雨雪雾强光、湿滑冰雪、复杂混行交通、突发高危危险工况,支持真人驾驶员在环、算法模型在环、域控制器实物在环多模式联合仿真,大幅缩短自动驾驶算法迭代周期,降低实车道路测试成本与安全隐患。
系统兼具学术科研、教学实训、方案验证、事故重构、ADAS 功能评测、车路协同 V2X 交互仿真能力,是高校科研、行业检测、智能驾驶前沿技术创新的核心综合试验载体。

5G远程驾驶与自动驾驶仿真系统技术参数
项目研制的智能座舱实景设备主要用于完成理论教学、测试、实训及鉴定考核任务,通过部署激光雷达、毫米波雷达、超声波雷达、摄像头、GPS + IMU组合定位系统完成智能网联汽车传感器原理及功能教学、安装、测试、标定实训。
| 3.1 产品组成 | |
|---|---|
| 智能座舱 |
• 产品名称:智能座舱 • 品牌:离火智能 • 型号:AD-TO1 • 生产商:青岛黑晶离火信息技术有限公司 • 功能:集成主控计算机、显示大屏、力反馈方向盘、踏板系统等 |
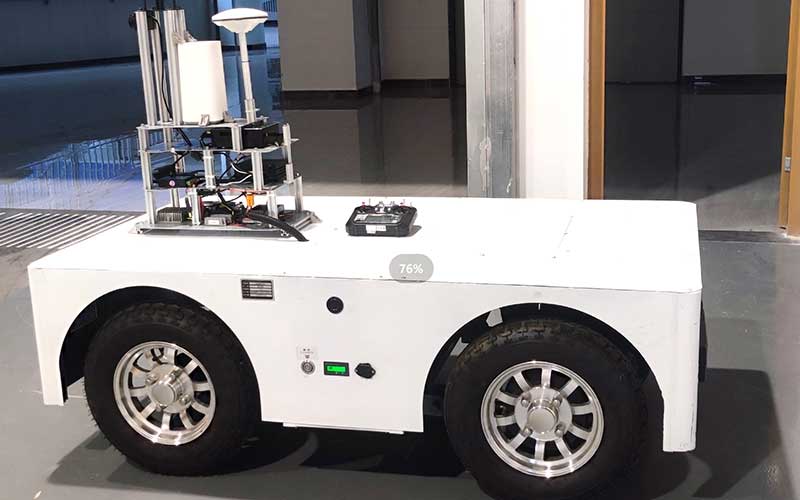
| 自动驾驶小车 |
• 产品名称:自动驾驶小车 • 品牌:离火智能 • 型号:L-ZDJ • 生产商:青岛黑晶离火信息技术有限公司 • 核心组件:ROS机器人、底盘(含驱动电机/电池组/防撞雷达) |
| 3.2 智能网联仿真平台技术参数 | |
| 一、硬件组成 | |
| 智能座舱 |
|
| 自动驾驶小车 |
• 底盘:后桥总成/驱动电机/电池组/制动模组
• ROS机器人:激光雷达支架/摄像头支架 • 计算单元:ROS主机/摄像机控制主机 • 网络设备:WIFI路由器 |
| 二、场景仿真系统 | |
| Unity3D高保真建模 |
模块划分:
|
| OpenX场景生成 |
• 支持OpenSCENARIO 1.2 • 参数化场景覆盖率≥90% |
| 三、仿真软件 | |
| 基础功能 |
• 4K@60Hz场景切换
• 集成CarSim/SUMO工具链 • VTD 5.2兼容支持 |
| 传感器仿真 |
• 激光雷达:128线/200m探测 • 摄像头:4K HDR@30fps • 毫米波雷达:77GHz/250m探测 |
| 四、仿真场景库 | |
| 预警场景 |
• 鬼探头预警(1-5m/s) • 前向碰撞预警(TTC 1.5-3s) |
| 五、场景采集设备 |
• 激光雷达:禾赛Pandar128(300万点/秒) • RTK定位:水平精度≤2cm • 采集工控机:Xeon W-3375/8TB SSD |
| 3.3 操作指南 | |
| 一、运行前检查 |
|
| 二、设备启动流程 |
智能座舱:
1. 开启控制主机 2. 选择驾驶界面 自动驾驶小车: 1. 底盘电源启动 2. 激活ROS主机 3. 视频网关通电 |
| 五、注意事项 |
• 禁止暴力操作设备 • 故障时立即停机 • 定期清洁维护 |
高校ADAS虚拟自动驾驶模拟舱技术参数
技术对比优势
| 参数 | 黑晶离火方案 | 行业常规方案 |
|---|---|---|
| 力反馈精度 | 5.5Nm直驱伺服 | 3-4Nm皮带传动 |
| 多屏协同延迟 | <15ms | 50-100ms |
| V2X场景支持 | 10类 | 4-6类 |
| 扩展接口 | 6路继电器+RJ45 | 4路USB |
技术白皮书
| 名称 | 描述 |
|---|---|
| 驾驶模拟器硬件设备 |
|
| 驾驶模拟器软件系统 |
|
5G远程驾驶/自动驾驶平台核心关键技术
低延时远程驾驶通信技术
支持 5G/4G 双模,低延时稳定传输;网络异常 / 断网 / 高延迟自动主动停车,满足远程驾驶安全底线。
沉浸式力反馈操控技术
力反馈方向盘 + 真实油门 / 刹车,1:1 还原实车操控手感,驾驶体验高度逼真。
多模 AI 感知与主动安全技术
人脸识别、疲劳 / 吸烟 / 墨镜检测;超声波防撞预警 + 主动制动,双重安全防护。
自动驾驶 Autoware 全栈算法技术
支持路径点巡航、open_planner 导航、ROS 机器人架构,实现 L2-L4 级自动驾驶仿真验证。
多传感器融合感知技术
1080P AI 相机 + 激光 / 毫米波 / 超声波雷达 + GPS / 北斗组合定位,360° 环境感知。
车云一体化智能网关技术
内置远程驾驶控制器,视频 / 底盘 / GPS 信号采集、指令下发全链路闭环。
高校ADAS虚拟自动驾驶模拟舱核心关键技术
高清多屏显示与智能控制技术
搭载80寸4K HDR大屏及多块高清触控屏,配备高性能控制板,实现多屏协同显示与精准操控。
高性能仿真计算硬件支撑技术
采用i7-12700KF处理器、32G内存及5060显卡,搭建高效模拟驾驶工作站,保障仿真流畅运行。
沉浸式力反馈操控仿真技术
配备5.5牛米伺服直驱力反馈方向盘与高强钢踏板,1:1还原实车操控手感,提升沉浸感。
元宇宙场景与多功能仿真软件技术
基于Unity3d开发,内置丰富交通场景,支持ADAS、V2X功能模拟及多终端交互显示。
全维度智能安全监测防护技术
集成DMS疲劳检测、超声波防撞预警及多重传感器,构建驾驶全流程安全防护体系。
高拟真座舱与智能控制集成技术
采用真车部件打造仿真座舱,支持车门、空调等多设备智能控制,适配二次开发需求。
软硬件实施优势

军工技术背景
2008年开始进入VR/MR领域,在军事仿真领域经验丰富。

专业虚拟仿真领军品牌
专业的军事仿真系统制作商、军事业务定制分包商、专业载具设计实施一体化供应商。

从业经验丰富
18年开发定制经验,专业行业领军品牌,具有丰富的软硬件多工种衔接配合经验。
内容创意能力优势明显
创意开发能力、以及对沉浸感的理解需要专业团队多年积累才能有优秀内容。
成功案例

成都吉利学院/湘潭理工学院 智能网联自动驾驶/远程驾驶实训平台
5G 智驾筑产教一体化实训科研基地面向高校智能网联汽车专业人才培养,搭建智能网联自动驾驶实训体系,集成 5G 线控底盘、远程驾驶座舱、ADAS 虚拟模拟舱,覆盖自动驾驶全流程教学、实训与科研,助力院校产教融合与智能网联专业人才培养。


重庆科技大学/同济大学 ADAS虚拟自动驾驶模拟舱
元宇宙智驾仿真标杆・科研实训双赋能黑晶离火与中国汽车工程研究院共同研发高校ADAS虚拟自动驾驶模拟舱,搭载高保真力反馈转向系统、多屏沉浸式座舱与 ADAS 仿真软件,实现真实驾驶体感与数字孪生场景深度融合,高度适配高校科研、教学实训与前沿技术验证,是智能驾驶仿真领域标杆级落地案例。


百度Apollo ADAS虚拟驾驶模拟舱
多屏联动虚实同构・赋能自动驾驶人机交互基于实车座舱与多自由度运动平台,打造多屏联动、L2–L3 全栈 ADAS+V2X 仿真测试系统。集成高保真 HMI、AR HUD、力反馈操控与交通场景编辑器,支持座舱交互评测、自动驾驶算法验证与数据回放,实现智能驾驶研发、教学与功能测频。


某智慧交通示范园区 5G远程驾控与V2X联合实训平台
低时延驾控 · 车路协同全域验证基于 5G 远程驾驶智能座舱与线控底盘,构建远程驾控、ADAS 功能评测与 V2X 车路协同一体化实训环境。支持多终端监控、异常主动停车与复杂交通场景复现,满足园区封闭测试、远程作业培训与智能网联方案验证需求。
科研驾驶仿真常见问题
科研驾驶仿真系统适用于哪些应用场景?
适用于高校智能网联汽车专业教学实训、自动驾驶算法科研验证、5G远程驾控试验、ADAS功能评测、车路协同V2X仿真及车企人机交互测试等场景,可按科研、教学或检测目标灵活配置平台形态。
5G远程驾驶与ADAS模拟舱有哪些核心功能?
支持激光雷达、毫米波雷达、摄像头等传感器教学标定,集成5G线控底盘远程驾控、高保真力反馈座舱、多屏沉浸式显示与数字孪生交通场景,覆盖L2-L3 ADAS、V2X及算法在环联合仿真。
如何选择专业的自动驾驶仿真实训供应商?
建议重点考察软硬件一体交付能力、高校与车企项目案例、技术参数响应与售后运维。黑晶离火拥有18年虚拟仿真经验与500+项目案例,可提供从方案策划、投标技术标到实施落地全流程服务。
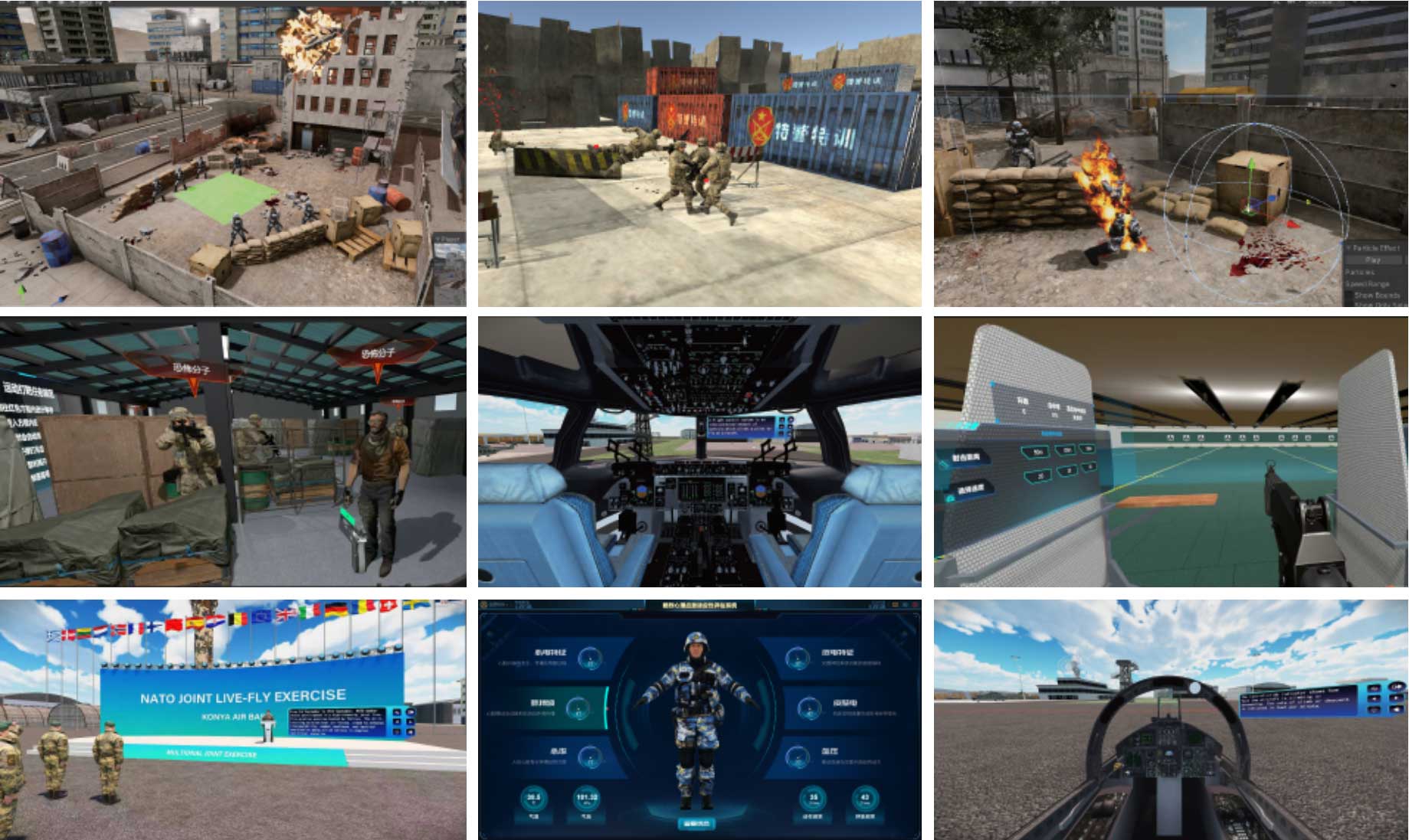
关于我们
黑晶离火是一家以VR虚拟现实、MR混合现实、AR增强现实为基础,为军事仿真与科研驾驶仿真行业提供定制化服务的科技企业,是专业的军事仿真系统制作商、军事业务定制分包商、专业载具设计实施一体化供应商。黑晶离火在虚拟驾驶仿真、虚拟飞行仿真、无人机模拟仿真、多人仿真训练实训系统、酷烈战场模拟仿真系统等领域具有多年开发研制经验,18年开发定制经验,专业行业领军品牌。原型公司成立于2008年,拥有软件开发、产品及结构设计、项目策划、硬件研发、系统开发、影视后期制作等一系列软实力支撑。多年来,黑晶离火深耕虚拟现实行业,在软件和硬件的一体研发应用上奠定了稳固的业内实力。
- 黑晶离火多次荣获海内外虚拟现实领域一等奖、金奖等。
- 曾承接中华人民共和国航空母舰虚拟现实交互系统。
- 承接空军某机型虚拟仿真操作系统。
- 承接火箭军拆装演习虚拟现实应用。
- 承接空军某部酷烈训练方舱系统。
- 承接LS陆军模拟飞行培训系统。
- 承接新疆某部无人机仿真训练坐席。
- 两次代表国内最先进虚拟现实品牌技术代表走出国门,参加世界级展会。




合作伙伴








